The aim of this work is the exploratory investigation of the application possibilities of multi-matrix fibre-reinforced composites in the field of soft robotic gripper systems, as well as the implementation of a suitable concept.
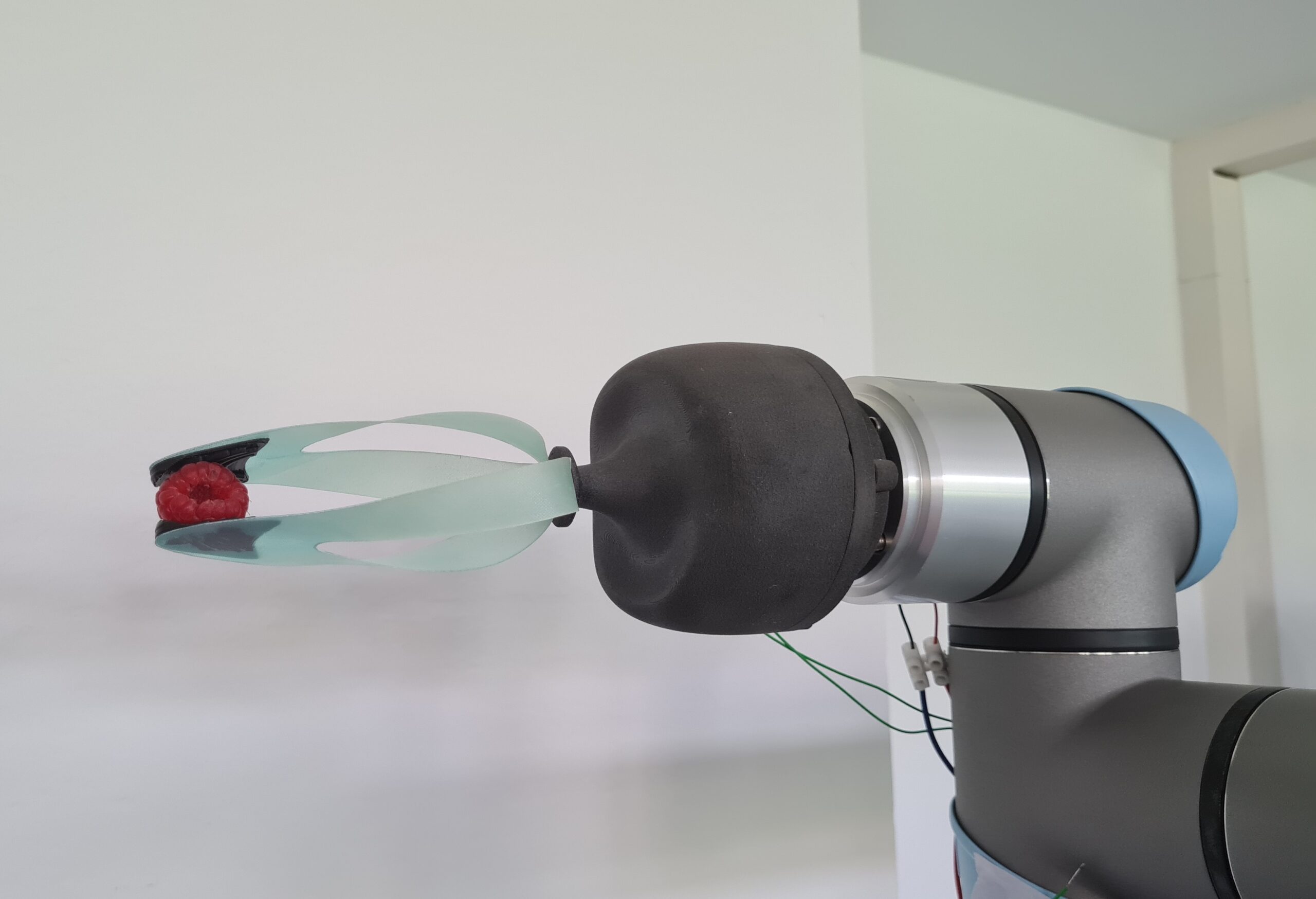
After comprehensive research and analysis of existing soft robotics systems, it was decided that the gripper should be designed to assist people with physical disabilities in their daily lives. Eight different concepts were developed. The selected idea was a gripper that can open and close like a flower through a rotational movement. In several manufacturing trials, various glass fibre shapes were tested. As a result, gripper fingers were produced that feature locally flexible bending zones within an otherwise rigid structure. By connecting these to a motor and a simple control system, a demonstrator was created that can grasp objects of varying sizes and shapes.
Diese Website benutzt Cookies. Wenn du die Website weiter nutzt, gehen wir von deinem Einverständnis aus.