Description
Minimally invasive surgery refers to operations performed through the smallest body incisions with the help of special instruments and camera systems. The gripping instruments used today usually provide insufficient haptic feedback. Misjudgements of the gripping force can lead to tissue damage.
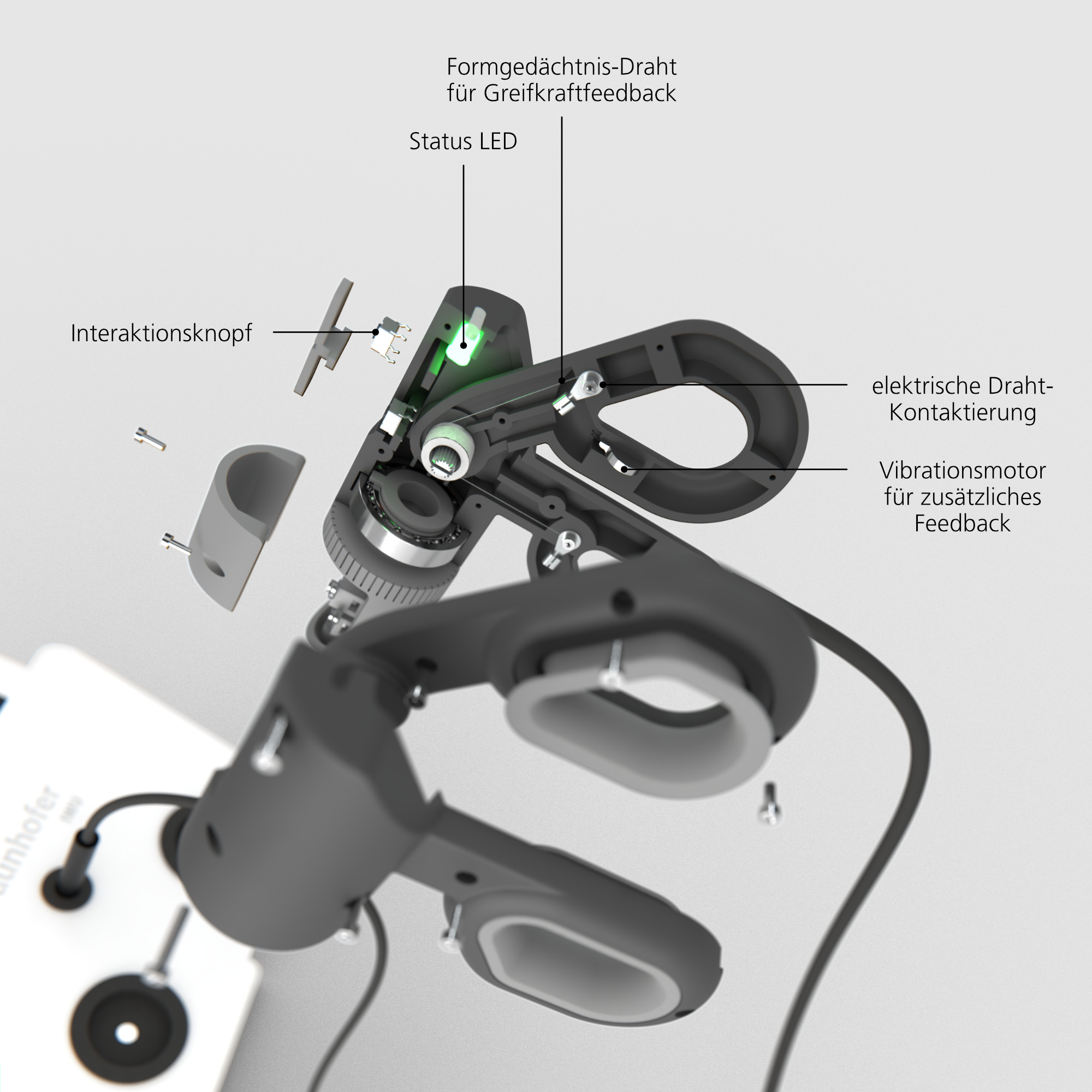
Shape memory alloys (SMA) are smart metals that can be deformed and reshaped through electric activation. They can be used to control grippers as well as gripping force sensors.
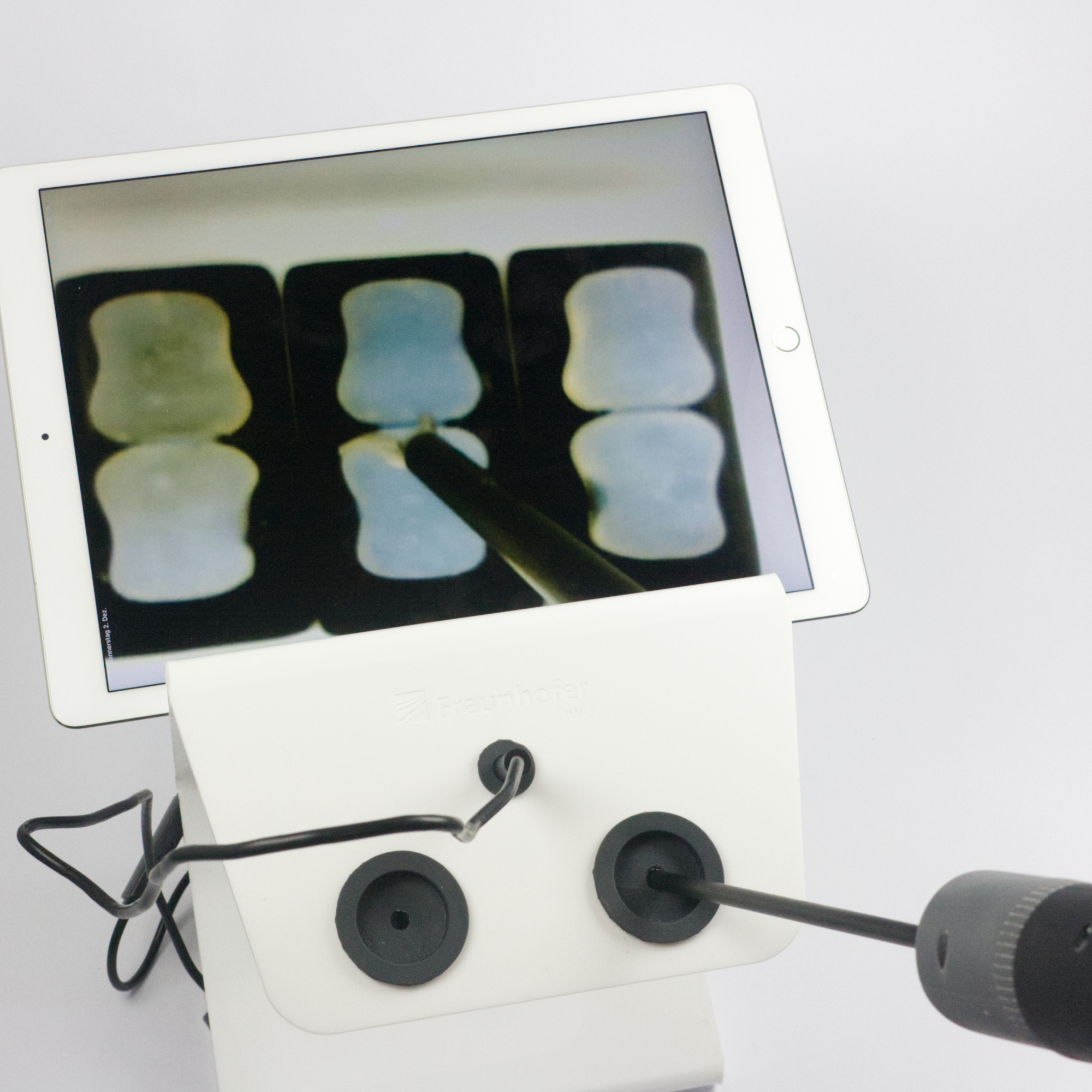
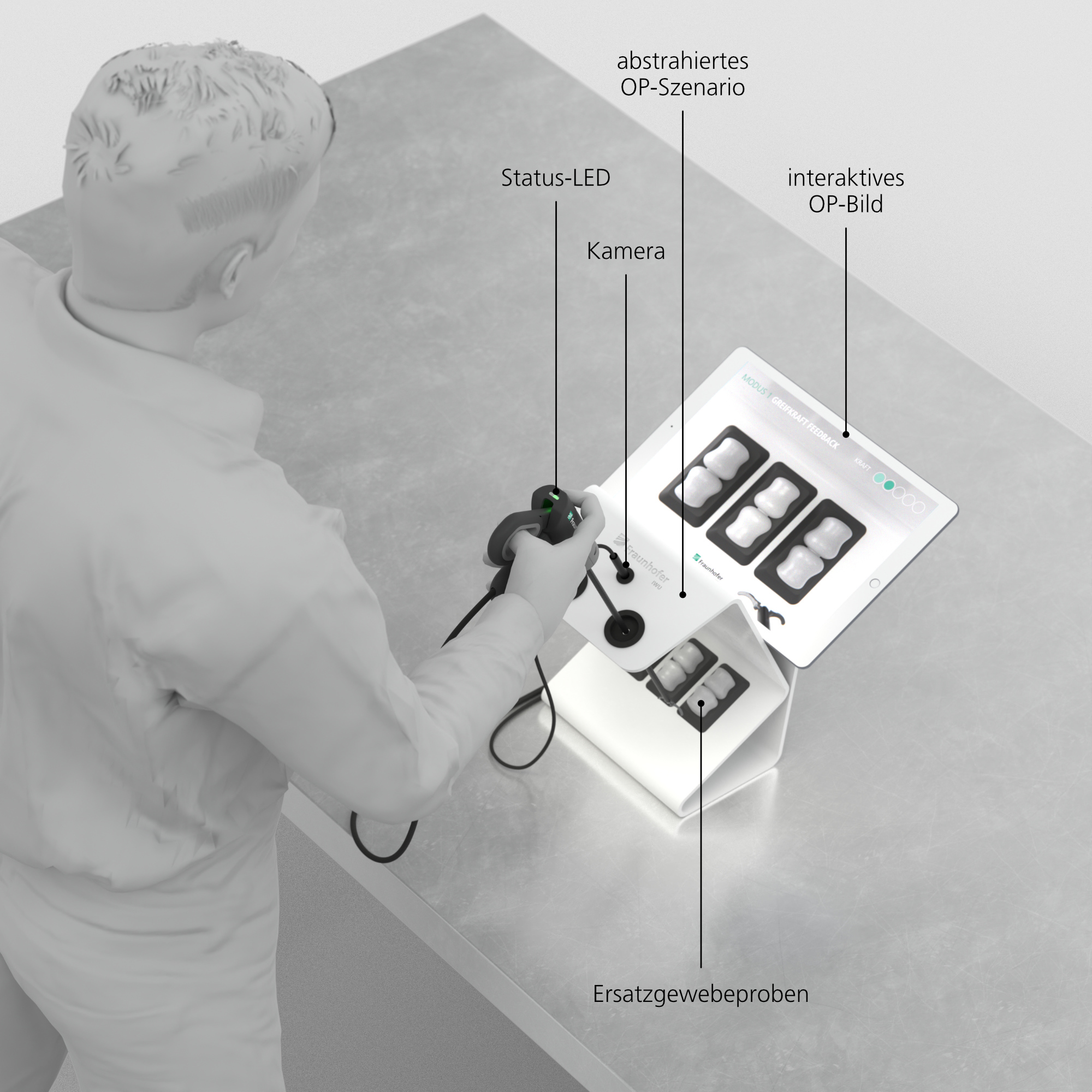
Using selected design methodology, surgical use cases were identified where the technology can add significant benefits. An intelligent grasping instrument was developed that integrates innovative but essential functions missing in today's instruments through the use of SMA. To communicate the research results, the gripper was embedded in a physical demonstrator representing an abstracted surgical scenario.