Description
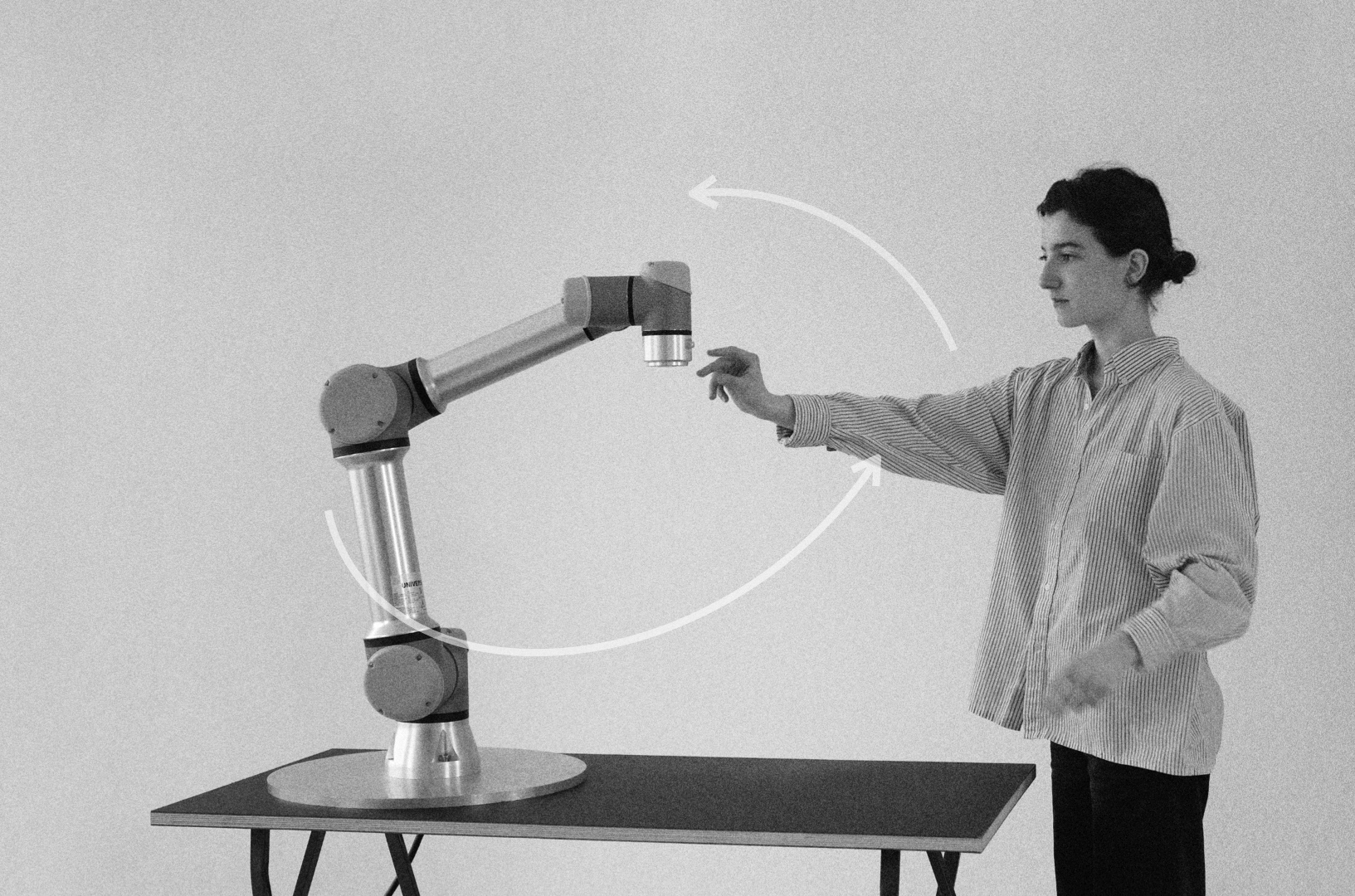
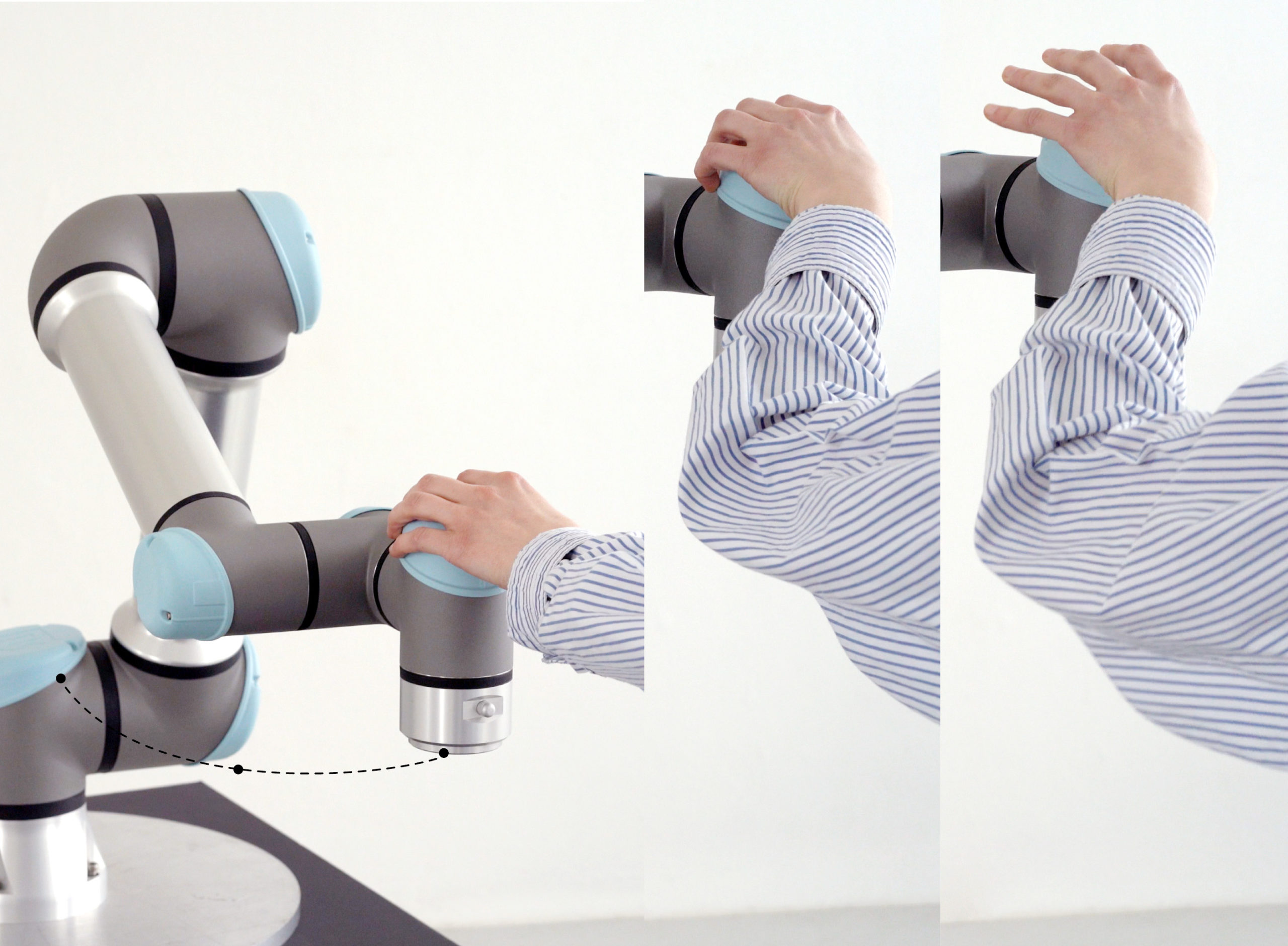
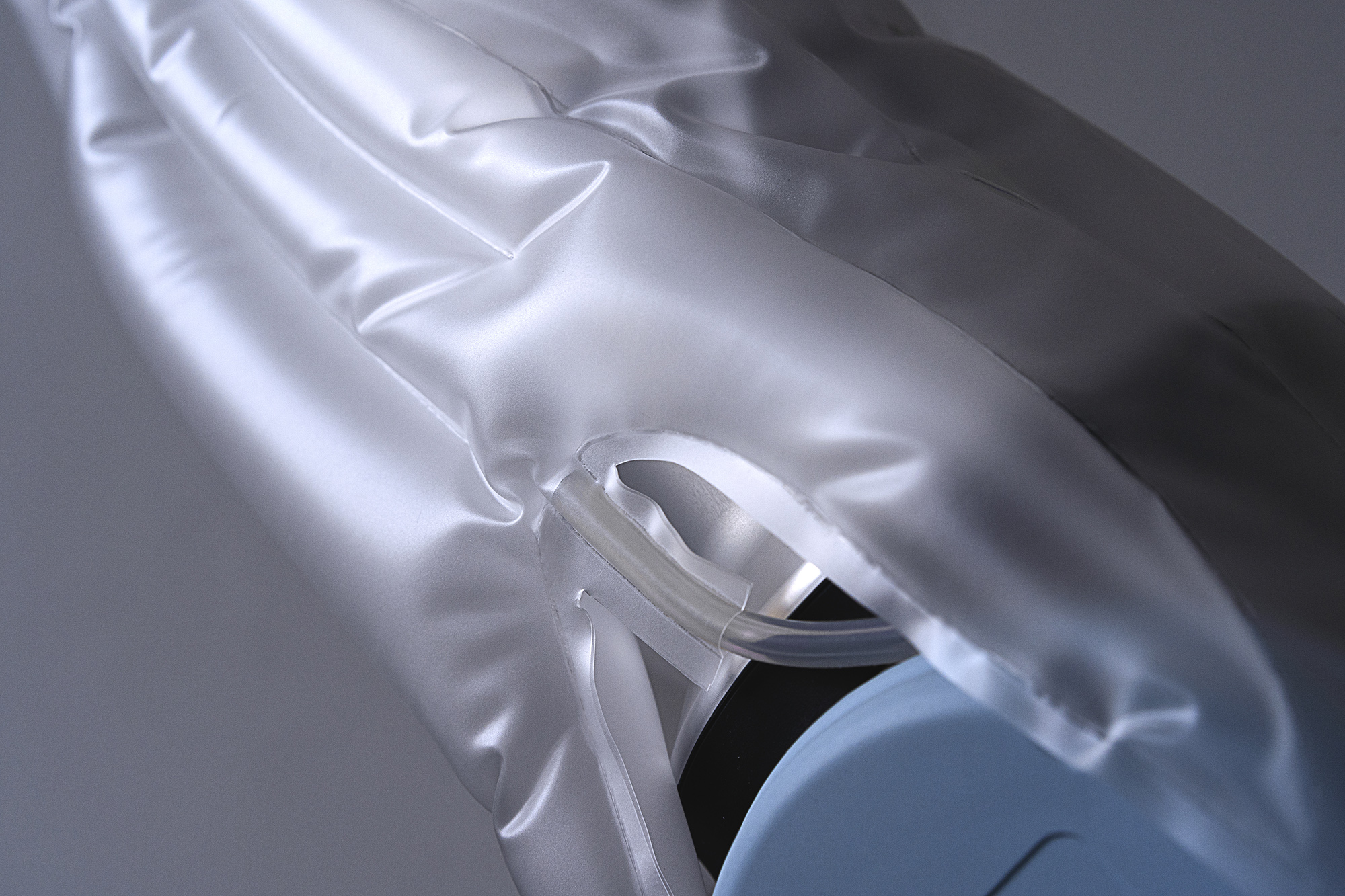
Situated Behaviors is a research project towards new interaction forms in the field of human-robotic collaboration. The notion of collaboration relates to the transmission of human’s empirical bodily knowledge in contact with material. I am interested in the ability of the robotic system to interpret the human gesture, to adjust and react to the given situation. Reconfiguring the relationship between human and robot means also to question the boundaries between these two entities. Resulting in rethinking the robotic apparatus by its form, materiality and its sensitive capacities through sensors.