Das Ziel dieser Arbeit ist die explorative Untersuchung der Einsatzmöglichkeiten von Multi-Matrix-Faser-Kunststoff-Verbunden im Bereich softrobotischer Greifersysteme sowie die Umsetzung eines geeigneten Konzepts.
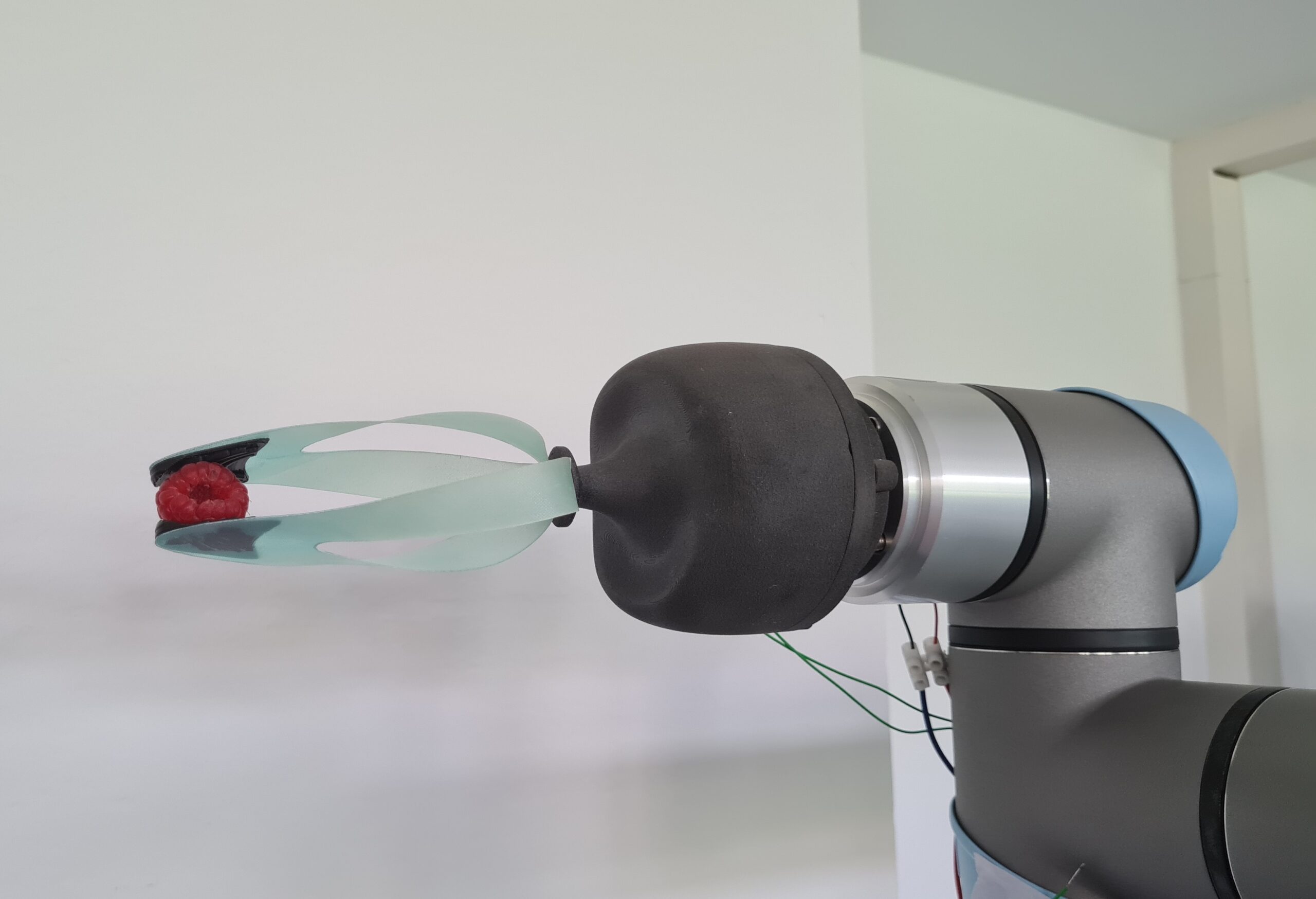
Nach einer umfassenden Recherche und der Analyse von bestehenden Softrobotiksystemen wurde entschieden, dass der Greifer die Funktion haben soll, Menschen mit körperlichen Einschränkungen im Alltag zu unterstützen. Dazu wurden acht verschiedene Konzepte herausgearbeitet. Die umzusetzende Idee war ein Greifer, der sich mit einer Drehbewegung wie eine Blume schließen und öffnen kann. In mehreren Herstellungsversuchen wurden verschiedene Glasfaserformen getestet. Anschließend konnten damit Greiffinger hergestellt werden, die lokal biegeweiche Bereiche innerhalb einer sonst biegesteifen Struktur besitzen. Durch die Verbindung mit einem Motor und einer einfachen Ansteuerung ist ein Demonstrator entstanden, der unterschiedliche Objektgrößen sowie -formen greifen kann.
Diese Website benutzt Cookies. Wenn du die Website weiter nutzt, gehen wir von deinem Einverständnis aus.