

Hip Exo
Nutzerzentriertes Design und Realisierung eines Soft-Exosuit zur Unterstützung der Oberschenkelmuskulatur
Kurzbeschreibung
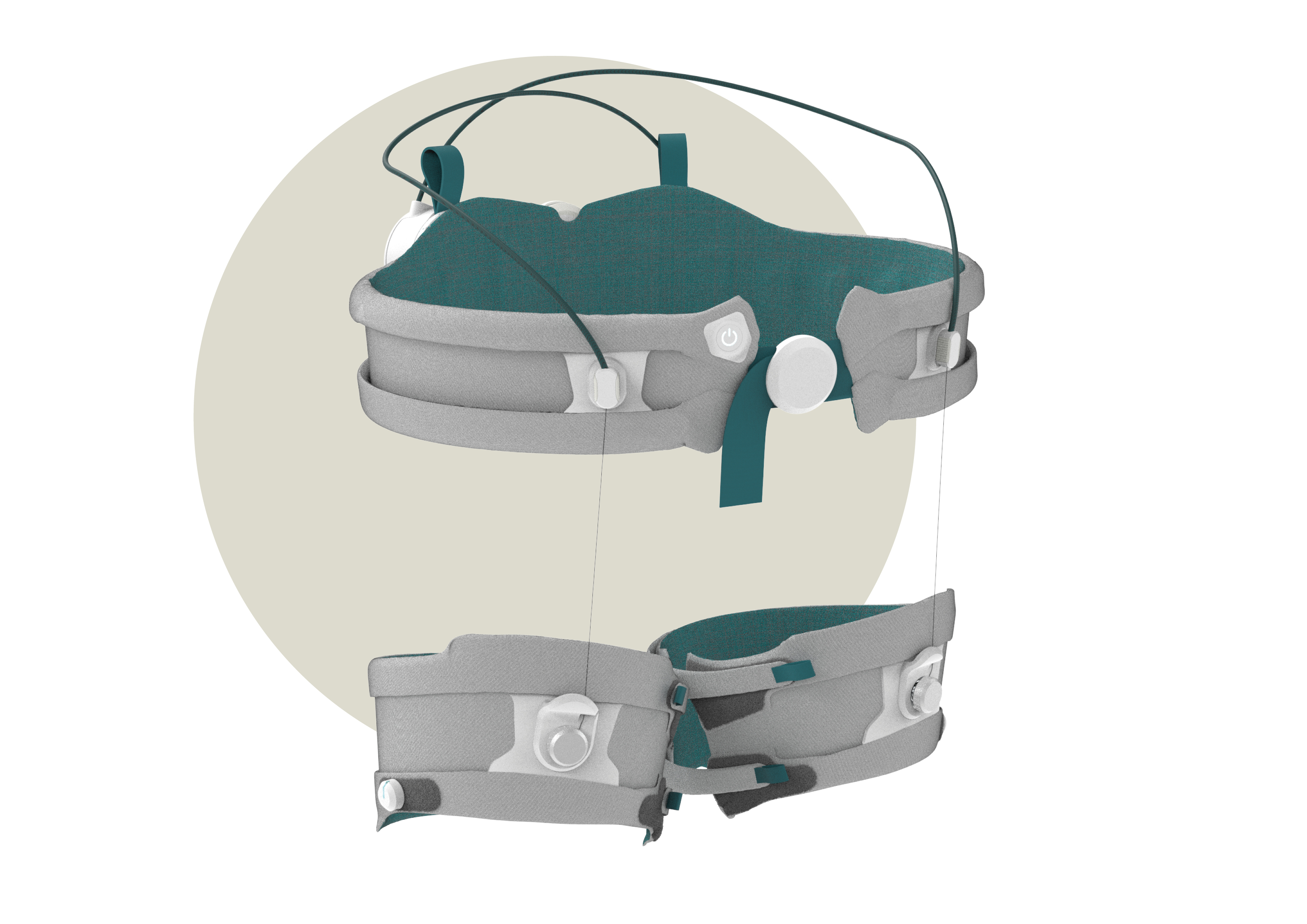
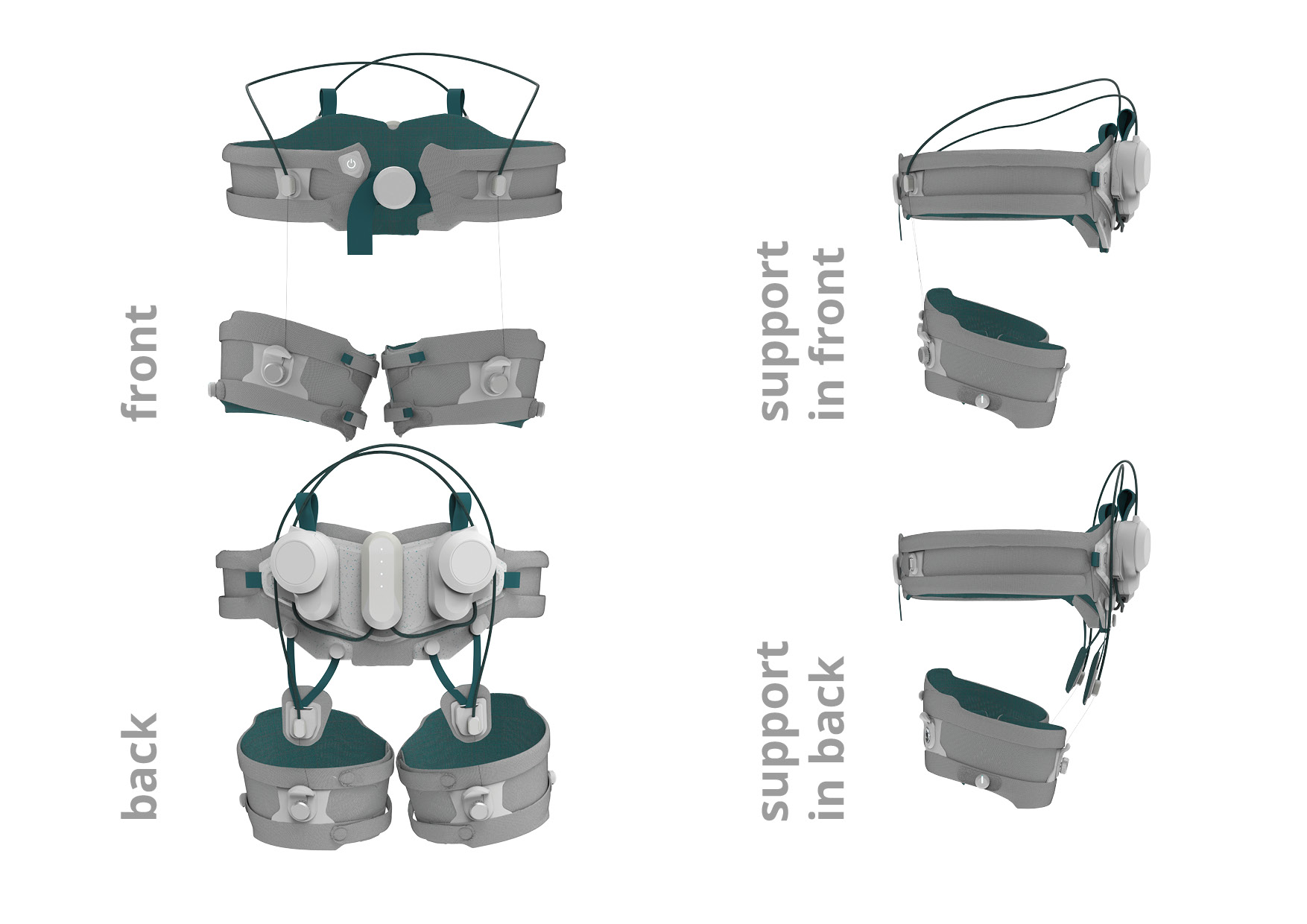
Basis meiner Arbeit war der „Exosuit Hip Exo“ des Aries Lab an der Universität Heidelberg. Das Gerät besitzt zwei Motoren, mit denen über einen Bowdenzug die Oberschenkel in ihrer Bewegung unterstützt werden können.
Für einen angepassten Prototyp habe ich im Austausch mit Physiotherapeut*innen häufig auftretende Beschwerden in Zusammenhang mit der Oberschenkelmuskulatur untersucht sowie bestehende Exo-Skelette und Exo-Suits hinsichtlich ihres Einsatzszenarios und ihrer Benutzerfreundlichkeit analysiert. Anschließend wurden die Ergebnisse mit den vorhandenen Funktionen des „Hip Exo“ abgeglichen, woraus sich final die Anwendung des Exo-Suits als Trainingsgerät für die Generation 70plus ergab.
In einem begleitenden Prozess untersuchte ich den aktuellen Stand des Hip Exo auf Schwachstellen und entwickelte einen funktionalen Prototyp weiter. Die entstandenen Erkenntnisse hinsichtlich der technischen Umsetzbarkeit wurden in ein digitales Modell des Hip Exo übertragen und an das definierte Anwendungsszenario angepasst.