
Im Rahmen dieser Diplomarbeit werden – ausgehend vom gemeinsamen Gabelstapler-Plattform – Exterieur-Designs für die KION-Marken Linde MH, Still, Baoli und OM entwickelt. Die Designentwürfe basieren auf den bereits vorhandenen Designsprachen der jeweiligen Marken und werden im Sinne einer neuen, modernen Gabelstaplergeneration weiterentwickelt. Ziel ist es, trotz des identischen technischen Aufbaus eine bestmögliche Markendifferenzierung durch das Design zu erreichen und gleichzeitig gemeinsame Designelemente beizubehalten, um Kosten für die Gabelstaplerplattform einzusparen.
Im Mittelpunkt der Arbeit steht das Staplerdesigns für Linde MH – orientiert an das Value-Segment. Die Designentwürfe für die vier Marken wurden mit Visualisierungsmethoden (CAD und AR) erlebbar gemacht und miteinander verglichen und evaluiert. Schließlich wurde die resultierende Design-Differenzierungsstrategie in einem kurzen Leitfaden zusammengefasst.
Kategorie: TU Dresden
Smart Materials in der minimal-invasiven Chirurgie / Smart Materials in Minimally Invasive Surgery

Als minimal-invasive Chirurgie werden Eingriffe durch kleinste Körperöffnungen mithilfe spezieller Instrumente und Kamerasonden bezeichnet. Heutzutage eingesetzte Greifinstrumente verfügen meist über unzureichendes haptisches Feedback. Fehleinschätzungen der Greifkraft können zu Gewebeschäden führen.
Formgedächtnislegierungen (FGL) sind intelligente Metalle, die sich durch elektrische Aktivierung verformen und rückformen lassen. Sie können zum Steuern von Greifern und als Greifkraftsensoren genutzt werden.
Unter Anwendung ausgewählter Designmethodik wurden chirurgische Anwendungsfälle identifiziert, in denen die Technologie einen Mehrwert bieten kann. Es wurde ein intelligentes Greifinstrument entwickelt, welches durch den Einsatz von FGL innovative, aber essenzielle Funktionen integriert, die in heutigen Instrumenten fehlen. Zur Kommunikation der Forschungsergebnisse wurde der Greifer in einen physischen Demonstrator eingebettet, der ein abstrahiertes Operationsszenario darstellt.
Aries Glove

Die menschliche Hand ist nicht nur eine der komplexesten anatomischen Strukturen, sie vor allem die wichtigste Schnittstelle für die Nutzung von Arbeitsmitteln und die Ausführung von jeglicher Aktivitäten des täglichen Lebens (Activities of Daily Life, ADLs). Leider wird die Funktion der Hand durch neuromuskuläre Erkrankungen und traumatische Ereignisse eingeschränkt und die Lebensqualität der betroffenen Menschen dramatisch verschlechtert. Die medizinische Rehabilitation der Hand ist nach wie vor eine Herausforderung.
Basierend auf bisherigen Entwicklungsergebnissen des Exo-Handschuhs von Aries Lab wird ein nutzer*innenfreundliches Produktdesignkonzept entwickelt. Aufgrund oft auftretender, post-traumatischer Depressionen nach einem Unfallereignis wie einem Bandscheibenvorfall oder einem Schlaganfall, soll der Exo Glove in der Anwendung nicht nur funktional unterstützen, sondern viel mehr für ein positives Erlebnis in der Rehabilitation sorgen.
COBOT
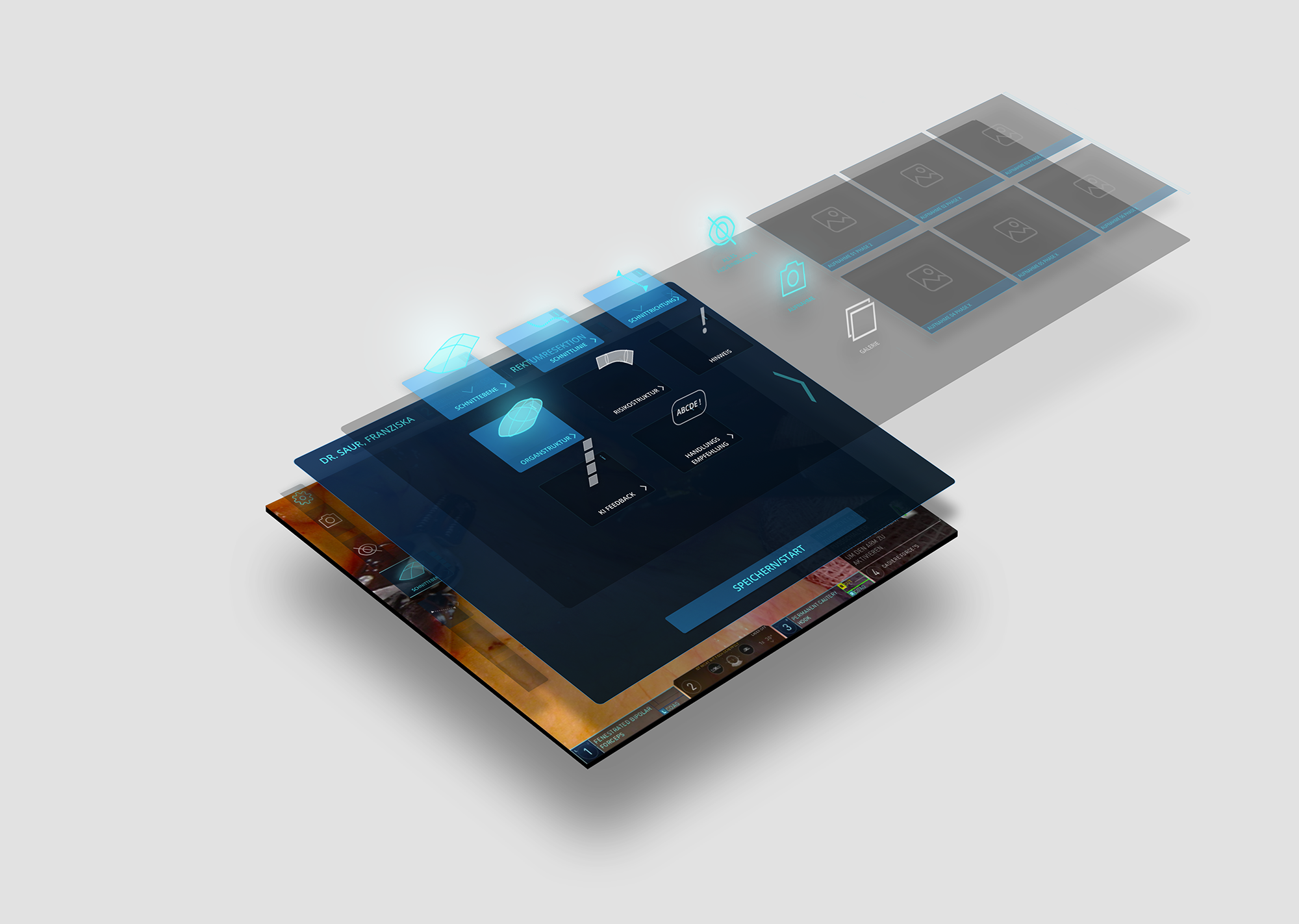
Das intelligente Assistenzsystem CoBot soll künftig Chirurg*innen bei roboterassistierten Eingriffen im Operationssaal unterstützen und dadurch die Präzision und Qualität dieser Eingriffe weiter verbessern. Anhand der Rektumresektion, einer komplexen, häufig bei Darmkrebs durchgeführten Operation, wird ein KI-basiertes System entwickelt, welches phasenspezifisch Strukturen erkennt und bedarfsgerecht relevante Informationen während der Operation in Echtzeit visualisiert. Das Touch User Interface als Schnittstelle zwischen KI und Operateur*in ermöglicht die dynamische Anzeige organischer Strukturen und Präparationsschichten sowie eine unmittelbare, sichere Bedienung durch eindeutige Interaktionsflächen für die Anpassung des Systems. Neben der Bedienbarkeit wurden bei der Entwicklung des Interfaces Aspekte der Akzeptanz und des Vertrauens in geschlossene, selbstagierende Systeme beachtet, um eine bestmögliche Unterstützung der Chirurg*innen bei der präzisen Arbeit im OP zu erreichen.
COOP

Automatisierung ist auf dem Vormarsch in der Landwirtschaft. Jedoch bleiben viele Fragen auf den immer größer werdenden Druck des Klimawandels auch durch den Einsatz von Robotern unbeantwortet. Eine höhere Technologisierung und Isolation von einzelnen Prozessen durch die Automatisierung rückt meist direkt oder indirekt von ökologisch- und sozial-nachhaltigen Zielen ab.
Diese Arbeit ist eine Auseinandersetzung mit zukunftsfähigen landwirtschaftlichen Prozessen mit dem Fokus der Bodengesundheit und der Regeneration des Ökosystems. Das mobile Stallkonzept Coop erschließt somit ein neues Gebiet der Robotik. Die mobile autonome Haltung von Legehennen und Mastgeflügel dient nicht als Ersatz von Arbeitskräften sondern als aktiver Enabler positiver Synergieeffekte auf dem Feld. Das Ergebnis ist ein Produkt welches ökologische, soziale und ökonomische Nachhaltigkeit vereint.