Die Menstruation und sexuelle Aufklärung sind in Südafrika nach wie vor Tabuthemen. Das vorliegende Konzept wurde zusammen mit Frauen, die Zuflucht in Frauenhäusern in Südafrika suchten, im Rahmen von vier Workshops erarbeitet und bietet die Möglichkeit einer leicht verständlichen Aufklärung zum Menstruationszyklus für Frauen und Mädchen. Die Aufklärung erfolgt anhand verschiedener Elemente: 1. durch die Integration eines Designworkshops als festen Bestandteil des Bildungsprogramms von Frauenhäusern in Südafrika, 2. mit Hilfe eines analogen Zykluskalenders für Frauen sowie 3. mit einem Kinderbuch für Mädchen. Ziel ist es, dass sich Frauen und Mädchen in ihrem eigenen Körper sicher fühlen können, wenn sie es schon nicht in ihrem eigenen Umfeld tun können. Denn aufgrund der politischen Situation und dem fehlenden Respekt gegenüber dem weiblichen Geschlecht ist die Sicherheit von Frauen dort nicht gewährleistet.
Kategorie: 2021
Persönliche Schutzausrüstung optimiert / Personal protective equipment optimized
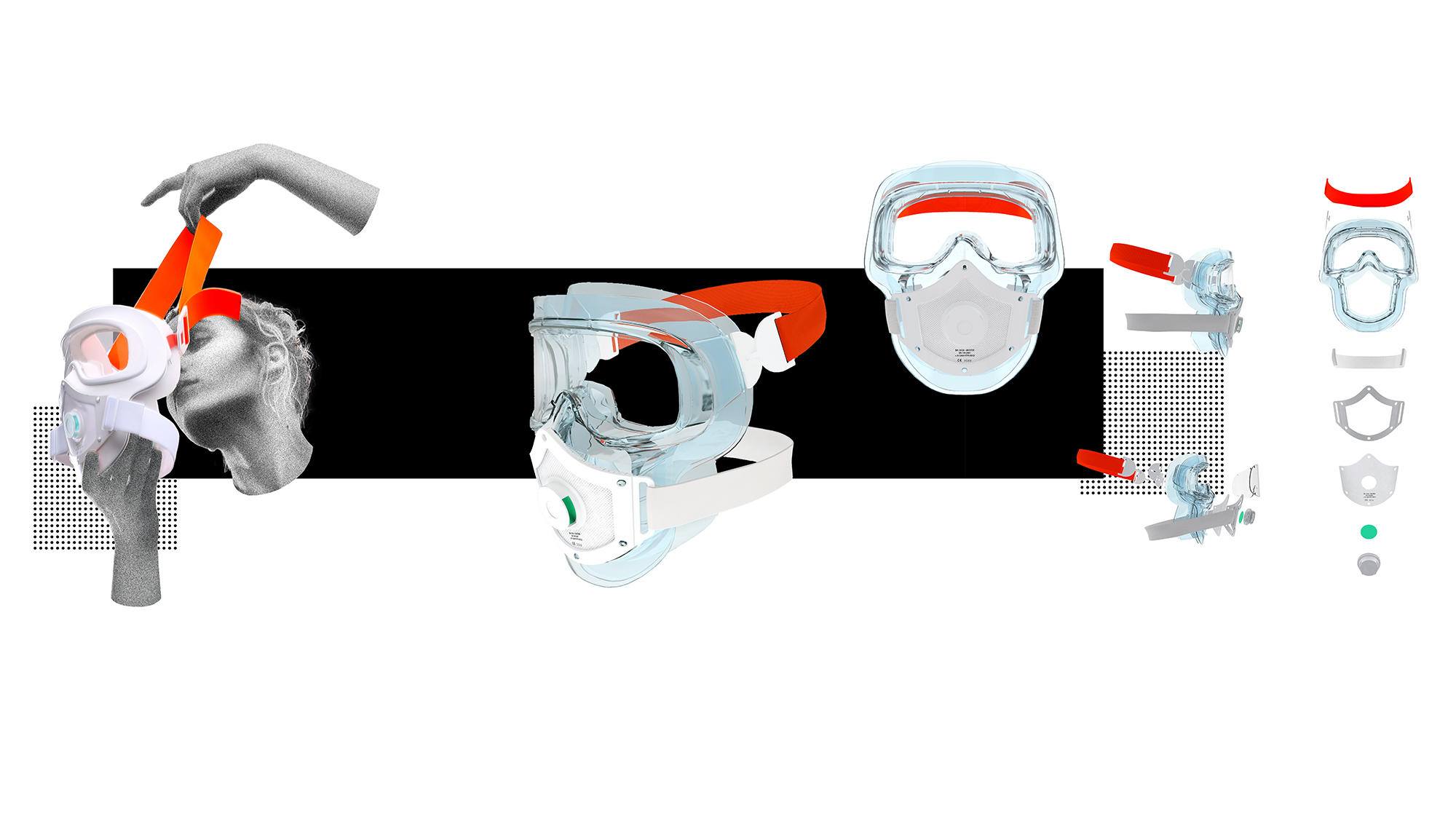
Das Schutzausrüstungsset besteht aus einem Schutzanzug, der nahtlos an eine Gesichtsvollschutzmaske anschließt. Darunter kann eine Kühlweste getragen werden. Da die Hauptkontamination vorne stattfindet, befindet sich der Reißverschluss am Rücken und lässt sich an der Maske fixieren, um ein unerwartetes Öffnen oder Verrutschen zu verhindern. Die Vollgesichtsschutzmaske besteht aus einem Visier und einer Atemschutzmaske mit einer austauschbaren Filtermembran. Auf diese Weise kann die Filtermembran flach produziert und platzsparend transportiert werden. Es entsteht weniger Abfall und gleichzeitig wird weniger Platz für Lagerung und Transport benötigt. Auch der Overall und die Kühlweste sind mit einem optimierten Schnittmuster gestaltet, so dass bei der Produktion Material eingespart werden kann. Durch das Tragen einer Kühlweste kann nicht nur die Körpertemperatur reguliert werden, sondern auch die Konzentration und die Tragedauer maximiert werden.
Die Verpackung von Lebensmitteln für eine klimagerechte und ressourcenleichte Gesellschaft
Die Arbeit handelt von Lebensmittelverpackungen und deren ökologischen Auswirkungen auf die Umwelt. Sie stellt eine Art Masterplan dar, welcher die Komplexität der Problematik greifbar machen soll, Zusammenhänge verdeutlichen und Gestaltungsansätze bieten.
Die enormen Mengen an Verpackungen führen in dieser Konsum- und Wegwerfgesellschaft zu massiven Umweltproblemen. Wertvolle Ressourcen werden rasant und verschwenderisch verbraucht – und dies entlang der gesamten Wertschöpfungskette. Zu Zeiten der Klimakrise wird umso deutlicher, dass dringend eine Transformation des Verpackungssystems stattfinden muss und damit auch der Gestaltung. Denn letztere hat grundlegenden Einfluss auf die späteren Auswirkungen von Produkten und sollte daher den Fokus bei der Gestaltung vor allem auf die Nachhaltigkeit legen. Die Hauptaspekte stellen das Vermeiden, Verringern und Verändern von Verpackungen und deren Herstellungs- sowie Umgangsweise dar – es geht um Unverpackt, Mehrweg und Wiederverwertung.
SCALE
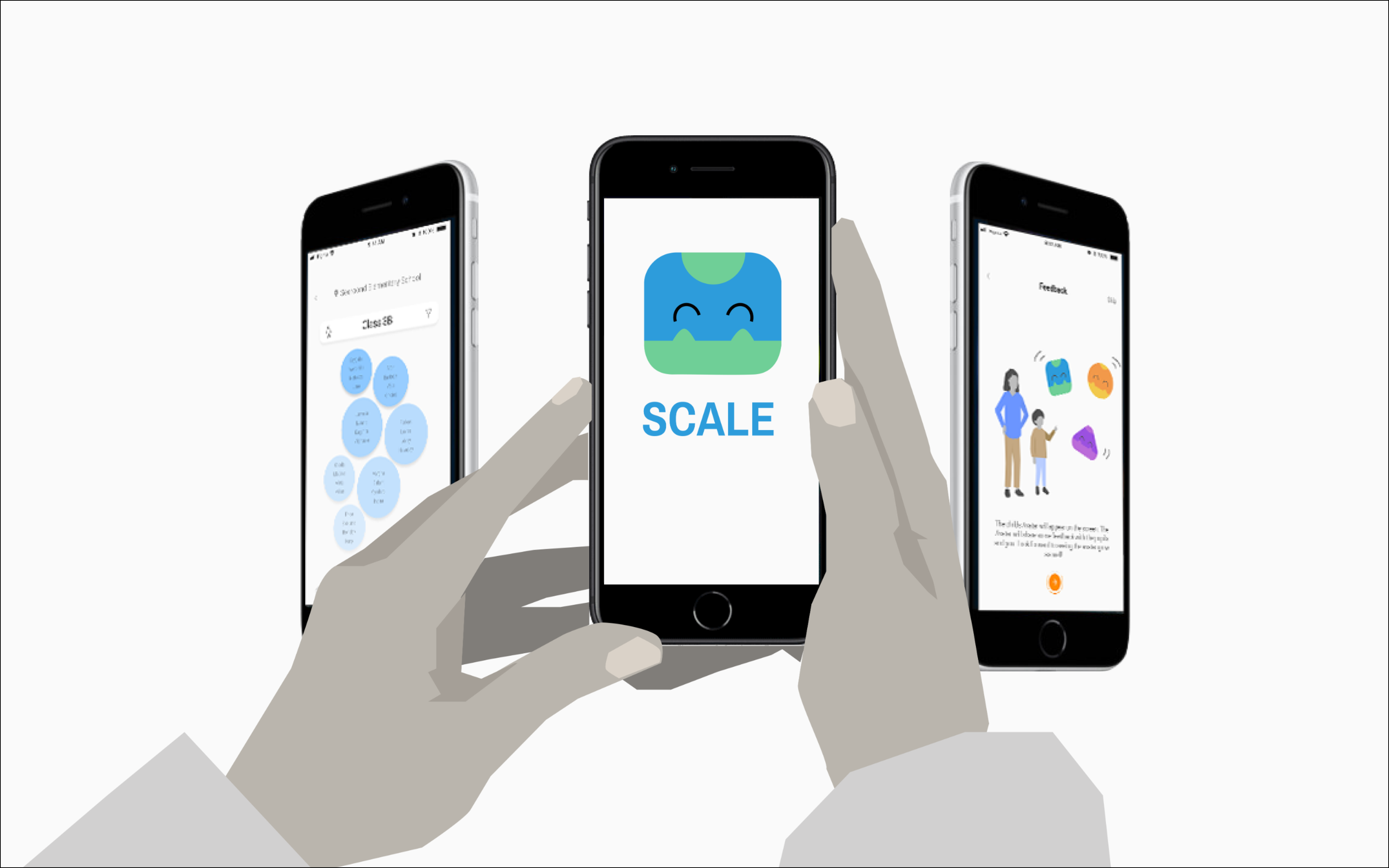
Kinderwachstum zu messen ist nicht nur ein wichtiger Bestandteil einer grundlegenden medizinischen Vorsorge, sondern wird auch als wichtiger Indikator genutzt um wirtschaftlichen und sozio-ökonomischen Status einzelner Regionen zu bestimmen. Da es oftmals keine einheitlichen Strukturen gibt um diese Daten effektiv sammeln zu können, hilft SCALE dabei, Daten zu Größe und Gewicht per Fotoalgorithmus zu erfassen und sicher in einer digitalen Krankenakte abzuspeichern. Um ein flächendeckendes Netzwerk hierfür aufzubauen wird SCALE in die Unterrichtsstruktur von Grundschulen eingebettet, was es ermöglicht macht, möglichst viele Kinder zu erreichen und eine umfassende medizinische Versorgung zu etablieren.
Lambdaläufer

Der Lambdaläufer schließt als sportliches Laufgerät die Lücke zwischen Fahrrad und Rollator. Als unterstützendes Fortbewegungsmittel, das für die alltäglichen Wege genutzt werden kann, bietet er die Möglichkeit die Muskulatur des Gehens gestützt und dennoch aktiv zu trainieren und den eigenen Bewegungsradius trotz körperlicher Einschränkung wieder zu erweitern. Durch die Mischung aus Rollen und Laufen entsteht hierbei eine ganz eigene dynamische Art der Fortbewegung.
Bürsten / brushes

BÜRSTEN
… sind Werkzeuge, die jeder benutzt, aber denen keine besondere Beachtung geschenkt wird. Schnell werden sie durch ein neues Modell ersetzt.
Porzellan ist wertig, rein und langlebig, genau das sind Bürsten leider nicht.
Den Bürsten soll zu neuem Glanz verholfen werden: Lässt sich der Besatz vom Bürstenkörper trennen, könnte nur dieser durch einen neuen ersetzt werden. Der Bürstenkörper aus Porzellan kann beim Wechsel problemlos gereinigt und immer wieder verwendet werden.
PYLON

Der „Pylon“, stapelbar und vielseitig in beiden Varianten, ist eine Schnittstelle zwischen Kunst und Design. Mit dem schlanken Aussehen und seiner platzsparenden Fähigkeit ist dieser Hocker für den modernen Designliebhaber gemacht.
Schmeckt Das?

Das Projekt “Schmeckt das?” ist ein interaktiver Online-Kochkurs, der Studierenden an deutschen Hochschulen die Möglichkeit bietet, unbekannte vegane Lebensmittel kennenzulernen, mit ihnen zu kochen und so neue Erfahrungen und Emotionen zu schaffen. Mithilfe dieses System kommen junge Menschen mit einer nachhaltigen und veganen Ernährung in Kontakt und können das im Kurs erlernte Wissen in ihre Ernährungsweise und ihren Alltag mit einfließen lassen.
KUBO – Die Kunstbox
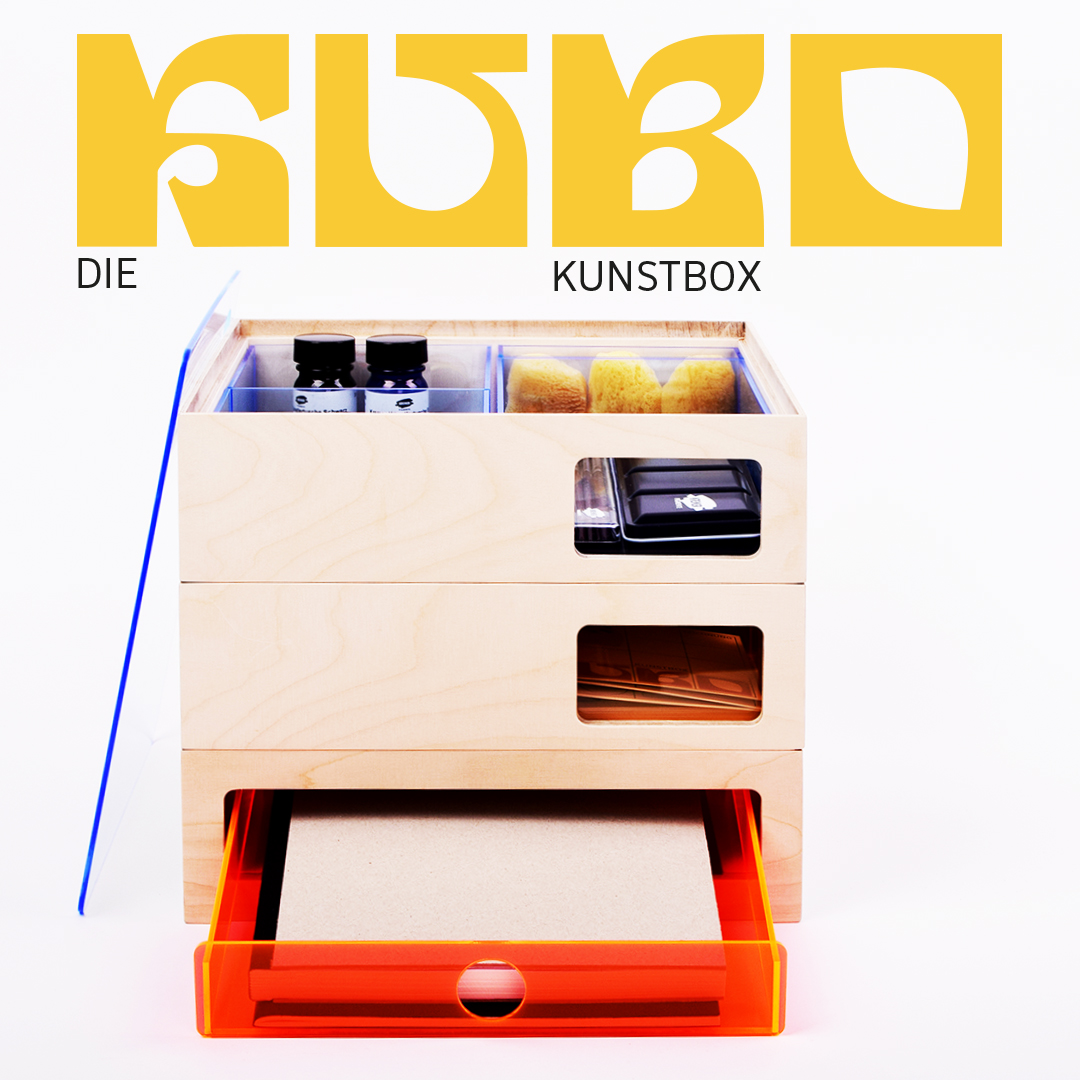
KUBO ist ein modulares System aus stapelbaren Holzboxen mit fluoreszierenden Acrylglaseinsätzen die einzeln herausnehmbar sind. Die Deckel der Boxen funktionieren gleichzeitig als Schablonen oder Raster. Zusätzlich zu den thematisch abgeschlossenen Boxen bietet eine Archivbox Platz für Skizzenbücher und Papier. Jede Box enthält eine Auswahl an festen und flüssigen Farben, ein Begleitheft, in dem das Material erklärt wird und Anregungen zu Techniken und Methoden zum selbstständigen Arbeiten gegeben werden, sowie 10 Kunstpostkarten zum jeweiligen Themenbereich. Sie stellen einen Bildfundus dar, Fragekarten bieten eine Reflexionsebene, um ein Vokabular zu entwickeln, um über Bilder zu sprechen. Durch eine Kooperation mit Kremer Pigmente kann KUBO eine hochwertige Qualität des Materials gewährleisten. Denn mit gutem Material macht Kunst am meisten Spaß! KUBO ist seriell angelegt, thematisch erweiterbar und zu 100% nachhaltig.
HUDDLE

Huddle ist ein Möbelset für Büro- und Coworking-Spaces, das den Anwendern eine leicht anpassbare Lösung sowohl für die individuelle als auch für die kollaborative Arbeit bietet.
Das Set besteht aus einem Schreibtisch und einem Regal, das als Ablage und Stehtisch dient. Beide Elemente haben hohe Rückenrahmen für die Montage von Akustikplatten, die sich nahtlos in die Metallstruktur einfügen. Diese Kombination des horizontalen Raums mit einer vertikalen Fläche erhöht neben der Maximierung der verfügbaren Arbeitsfläche den Komfort des Benutzers, indem sie Privatsphäre in einem offenen Raum bietet.
Der industrielle Charakter der Werkstatteinrichtungen wird durch langlebige Materialien in einer modernen Ästhetik referenziert. Huddle-Möbel eignen sich nicht nur für Werkstätten oder Büroräume, sondern können auch als Basis für die gemeinsame Arbeit verschiedener Haushaltsmitglieder dienen – eine “Arbeitszone”, die in den Rest des Interieurs zu Hause integriert ist.